locoformer
作者机构:Skild AI
相关链接:
- https://generalist-locomotion.github.io/resources/locoformer\_corl\_2025.pdf
- https://arxiv.org/html/2509.23745v1
- https://generalist-locomotion.github.io/
发表年月:2509
现代运动控制器需针对特定机器人机体进行人工调参。
本文提出通用型全机体运动控制模型 LocoFormer,��能够控制此前未接触过的腿式与轮式机器人(泛化),即便在不掌握这些机器人精确运动学参数的情况下仍可实现控制。在测试阶段,LocoFormer 还能适配机器人形态与动力学特性的变化。
在程序化生成的机器人上,通过激进的领域随机化策略开展大规模强化学习(RL)训练;
不同于以往上下文长度较短、存在 “短视性” 的策略,将上下文长度提升多个数量级,使其能够跨越片段(episode)边界。
将同一 LocoFormer 模型部署于不同类型的机器人,结果表明,即便在重量变化、电机故障等强干扰场景下,模型仍能实现稳定控制。
在极端场景中,可观察到模型跨片段的涌现式适配行为 ——LocoFormer 会从早期片段中的摔倒经历中学习,进而在后续片段中优化控制策略。
摘要
人类和动物在移动能力方面表现出极强的适应性,例如
- 出生后不久就能学会行走
- 在肢体截肢后逐步适应
- 人类婴儿也具备交替踏步等反射行为
而当今机器人的移动能力:
- 通过RL从零开始学习
- 需要针对特定本体调参
- 适应范围有限,几百毫秒
- 仅考虑分布内场景,通用性弱
本文在覆盖范围广泛的任务分布上,结合极端领域随机化(extreme domain randomization)进行训练。
当训练过程中面临高度多样化的任务时,控制策略必须学习通用型策略 —— 先高效完成任务识别,再通过调整控制方式以实现良好的任务性能 。
这一现象与大型语言模型(LLMs)的特性类似:在 LLMs 中,网页级规模的预训练使其能够在测试阶段通过 “上下文��内适应”(in-context adaptation)完成新任务。
设计了一个规模庞大的 “程序化生成机器人” 空间,其中包含双足机器人、四足机器人,以及它们的腿式与轮式变体;同时对这些机器人的参数进行了激进的随机化处理,包括惯性、控制增益和关节限制等参数的大幅变动。
方法
上下文学习预训练
对于不同的本体
- 一种思路是策略以详细的运动学和动力学为条件进行学习,但是,该方法通常需要大量的系统辨识工作,且容易受到机器人长期使用过程中磨损老化所导致的参数偏差影响
- 让模型在测试阶段具备上下文学习能力
当前运控模型都存在短视性,但有时候我们甚至需要跨越试次(trial)便捷,即训练时模型在一个片段(episode)内进行多次尝试,同时保留尝试之间的信息,训练目标是最大化整个片段内的期望累计奖励。
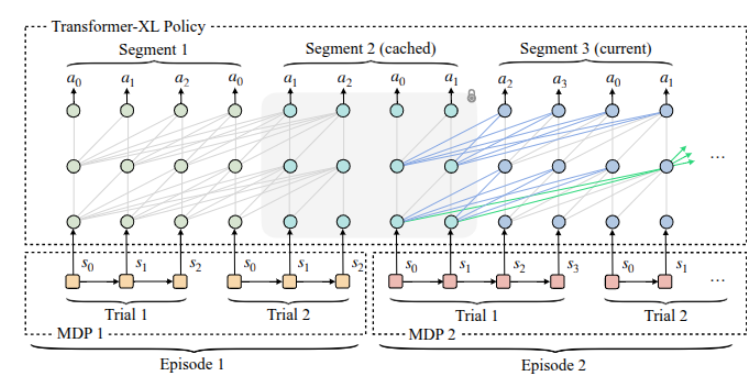
为实现长上下文适配,让 LocoFormer 能够关联先前试次(trial)的状态信息。采用长上下文 Transformer 作为骨干网络,该网络会将上下文划分为固定长度的片段(segment)。在处理当前片段时,会同时利用前一个(缓存的)片段中的状态计算关键值(keys)和价值(values),但不会反向传播梯度(蓝色线条所示)。随着网络层数的增加,这一设计使 LocoFormer 甚至能够利用缓存片段之前的更早片段中的信息(绿色线条所示)。
任务生成
通过程序化方式生成各类腿式机器人,并对其物理参数进行随机化处理,以构建多样化的 MDP 实例。
主要聚焦于双足、四足机器人及其轮式变体等常见形态,且未纳入市场上任何真实机器人的精确参数。
对于每种形态,参考现有腿式机器人的通用设计原则,对关节类型、关节顺序等常见运动学参数进行随机化,同时也对质量、质心位置等动力学参数进行随机化。
统一的观测、动作与奖励空间
为了训练一个可在不同腿式机器人间共享的控制策略,采用了一种简洁的 “统一关节空间” 来实现一致的观测和动作表示 —— 通过拼接一个 “关节超集”(该超集包含了大多数现代腿式机器人的电机数量)来构建这一空间。控制策略在统一关节空间内输出目标关节位置,之后再为每个特定机器人提取对应的关节状态。
在奖励设计上,采用了受Legged locomotion in challenging terrains using egocentric vision 启发的方案,包含 “指令跟踪奖励” 和若干惩罚项:惩罚项用于减少扭矩消耗、鼓励动作平滑性,并防止硬件损坏。
仿真环境中的大规模强化学习
运动控制任务的试次通常持续时间较长。为了突出适配学习过程,我们对公式定义稍作修改:不再直接采样固定数量的试次,而是采样一个时长为u秒的 “适配时间预算”$u \sim Uniform(0, U)
$,允许控制策略在最终试次前,于该时间预算内执行任意数量的试次。
在修改后的设定下,在物理仿真环境中基于PPO算法对控制策略进行大规模优化。训练分为两个阶段:
- 初期采用较短的试次时长和较小的U值,优先让模型掌握适配行为
- 随后延长试次时长和适配时间,为策略的真实世界部署做准备。
部署
预训练完成的策略可通过零样本(zero-shot)和少样本(few-shot)两种方式实现上下文内学习:
- 在零样本场景下,策略可在数秒内快速适配未接触过的机器人机体,通�常能立即实现稳定运动;
- 但初始探索过程中偶尔会出现失败,此时策略可借助少样本学习 —— 通过利用先前试次的经验逐步提升性能。
Transformer-XL策略
假设为每个时间步的观测数据,这些数据会被编码为令牌(token)。Transformer-XL(简称TXL)将令牌划分为长度为的片段(segment),考虑两个连续的片段:与。设表示片段在Transformer第层的隐藏状态。
Transformer-XL会利用来自前序片段的缓存隐藏状态计算当前注意力机制的关键值(keys)和价值(values),但不会向这些缓存状态反向传播梯度,以此节省计算资源与内存。形式化地,给定前序片段的隐藏状态,Transformer-XL按以下方式计算:
\tilde{h}_{z+1}^{n-1} = \left[ SG(h_z^{n-1}) \circ h_{z+1}^{n-1} \right] \tag{2}
q_{z+1}^n, k_{z+1}^n, v_{z+1}^n = h_{z+1}^{n-1} W_q,\ \tilde{h}_{z+1}^{n-1} W_k,\ \tilde{h}_{z+1}^{n-1} W_v \tag{3}
h_{z+1}^n = \text{Transformer-Layer}(q_{z+1}^n, k_{z+1}^n, v_{z+1}^n) \tag{4}
其中,表示停止梯度(stop-gradient)操作,表示沿序列长度维度进行拼接,、、均为模型的可学习参数。
在强化学习(RL)训练过程中,每个片段都会被缓存,以作为后续迭代的条件。这种片段级的循环机制使得有效上下文长度以的规模增长(其中为网络层数,为片段长度)。
例如,一个包含6层、片段长度为128的Transformer,其最大可用记忆可覆盖896个时间步;若控制频率为50Hz,这一时间步长度对应约18秒的实际时间。需注意,片段可能会跨越片段(episode)边界,在此情况下,需调整注意力掩码(attention mask),确保注意力机制不会跨越episode边界进行关联。
推理加速
利用键值缓存(KV-cache),在训练阶段的轨迹生成(rollout)过程中,先利用前序片段隐藏状态导出的关键值(keys)和价值(values)初始化KV-cache,再逐步追加新的时间步数据。在实时部署场景中,KV-cache仅保留最近的
个时间步数据——对应训练过程中遇到的最大直接条件化历史长度。
性能对比
| 方法 | 双足机器人(Biped) | 四足机器人(Quadruped) | 轮式机器人(Wheeled) | 平均值(Average) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| G1 | H1 | GR1 | TRON1 | BK-H | A1 | Spot | AnyMal C | TRON1-W | Go2-W | ||
| 本文方法(零样本) | 0.96±0.16 | 0.98±0.12 | 0.95±0.21 | 0.87±0.31 | 0.98±0.11 | 0.92±0.26 | 1.00±0.06 | 0.95±0.22 | 0.99±0.07 | 0.97±0.16 | 0.96±0.19 |
| 本文方法(少样本) | 0.98±0.11 | 0.99±0.08 | 0.99±0.09 | 0.96±0.18 | 0.99±0.09 | 0.94±0.23 | 1.00±0.05 | 0.96±0.19 | 1.00±0.04 | 0.98±0.10 | 0.98±0.13 |
| 门控循环单元(GRU) | 0.09±0.06 | 0.08±0.11 | 0.09±0.11 | 0.03±0.03 | 0.47±0.40 | 0.46±0.44 | 0.68±0.37 | 0.42±0.45 | 0.66±0.34 | 0.74±0.36 | 0.37±0.41 |
| 条件控制(Conditioning) | 0.94±0.17 | 0.94±0.16 | 0.81±0.33 | 0.07±0.15 | 0.62±0.38 | 0.93±0.24 | 0.99±0.09 | 0.89±0.28 | 0.72±0.40 | 0.92±0.22 | 0.78±0.37 |
| 专家策略(Expert Policy) | 1.00±0.00 | 1.00±0.00 | 1.00±0.00 | 1.00±0.00 | 1.00±0.00 | 0.97±0.18 | 0.99±0.08 | 1.00±0.04 | 1.00±0.00 | 0.98±0.12 | 0.99±0.07 |
3类共10个未接触过的机器人上对各方法进行评估,每个机器人对应1000个仿真环境,且环境包含崎岖地形与大范围领域随机化。表中每个数值均表示机器人向随机采样目标点移动的平均位移,已归一化至[0,1]区间。LocoFormer在零样本场景下表现具备竞争力,且经过短暂的5秒适应窗口后性能进一步提升(在TRON1机器人上提升10%)。平均来看,其性能接近专家策略,且优于门控循环单元(GRU)与条件控制(Conditioning)这两个基线方法。
适配性能
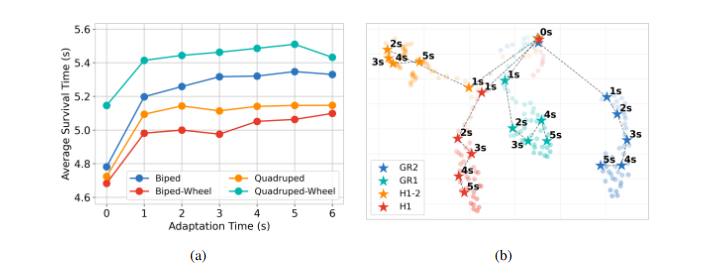
为评估 LocoFormer 的适配能力,将领域随机化强度提升一倍,并将程序化生成的机器人部署于崎岖地形。在不同适应时间预算下(每种设置对应 5 万次片段测试),记录了 6 秒轨迹��内机器人的平均摔倒时间。
如图 6c 所示,即便在零样本场景下,LocoFormer 也能有效适配复杂领域;短时间的适应即可带来显著性能提升。随着适应时间增加,所有形态机器人的生存时间均有所延长,这充分体现了长上下文学习的优势。
表征动态
为进一步分析适配过程,对内部表征的时间演化进行了跟踪。具体而言,在四种人形机器人变体的 4096 次零样本轨迹测试中,监测了 Transformer 第二层的平均输出(如图 6d 所示)。
初始阶段(前 1 秒内),各机器人的嵌入表征(embedding)较为相似;随着时间推移,表征逐渐分化,这反映出控制策略对不同机体的特化程度不断提升。5 秒时,已形成明显的表征簇,这表明该策略无需显式输入机器人描述信息,即可构建稳定的、特定于机体的内部模型。
真实世界测试
关节锁定(将PD控制器的设定值改为固定值进行锁定),LocoFormer 最初会出现前倾,但经过 2-3 秒的适应后,能学会将重心后移至三条腿上,甚至实现稳定行走。类似现象也出现在轮式四足机器人上:当一条或两条腿被锁定时,LocoFormer 会调整步态以重新分配负载,即便驱动能力下降,仍能保持平衡与移动能力。
在高度不稳定的场景中,单次试次内的适配可能无法成功。让 LocoFormer 控制一款 “无踝关节电机 + 单点支撑” 的双足机器人:该平台稳定性极差,在失效前几乎没有足够时��间调整平衡。由于 LocoFormer 此前未接触过这种形态,第一次试次以失败告终。
但模型会将失败轨迹的信息存储在 Transformer-XL 的缓存中,并在后续试次中调用这些信息 —— 到第三次试次时,机器人已能以双足模式稳定行走,甚至能抵抗外力推搡与额外负载。
车轮锁定,Go2-W 轮式机器人初始状态为滚动行驶,通过软件将车轮控制器的增益设为零,在运行过程中程序性锁定车轮。这一操作会瞬间改变机器人的动力学特性(无法再通过滚动移动)。LocoFormer 能检测到这种 “指令与效果不匹配”(向车轮发送指令但无预期运动),并快速适配:切换为类似标准腿式双足机器人的行走步态。
当车轮重新解锁后,LocoFormer 会再次检测到状态变化,切换回能耗更低的滚动步态。此外,当机器人加载外部质量时,模型也能调整步态以维持平衡。
加装高跷,在机器人腿部加装高跷,使其 “腿身长度比” 远超训练过程中接触过的范围。这一改动会通过抬高质心、改变摆动 / 支撑阶段的力臂,同时改变机器人的运动学与动力学特性。
初始阶段,机器人仅能迈出几步不稳定的步伐;但 LocoFormer 会快速调整协调方式(如改变步频、调整落足点),以适配加长的肢体形态,最终实现稳定、可重复的向前行走。
腿部截断,将机器人的小腿部分截断至大腿处,这一操作会减少 4 个自由度,并缩短肢体长度 —— 该形态同样未包含在训练数据中。初始时,机器人无法有效移动,仅能原地踏步;但经过 7-8 秒的适应后,模型发现需通过大腿关节的大振幅摆动实现移动,后续即可高效完成 locomotion(运动控制)。
训练
专用策略的训练成本约为每个机器人1天,而LocoFormer的总训练成本虽为专用策略的500倍,但摊销到10万个机器人后,单位机器人成本仅为0.005天
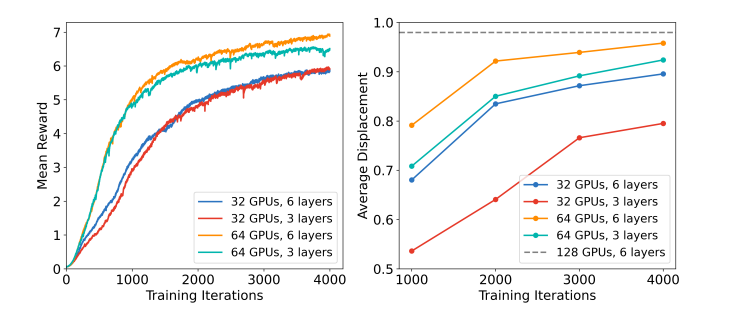
- 实验中使用32 GPU、64 GPU和128 GPU进行训练,不同配置对性能有直接影响。128 GPU搭配6层Transformer-X能获得最佳性能。
- 以6层TXL架构为例,在32 GPU上训练4000轮需约28小时;若提升GPU数量或增加网络层数,时长会相应调整,但性能也会同步提升。
- 训练初期使用较短的 trial 时长和较小的适应时间预算,优先学习基础适应行为;后期再延长时长,为真实场景部署做准备,避免前期资源浪费。
- 采用KV缓存(KV-cache)将推理复杂度从时间步的二次依赖降至线性依赖,同时仅保留最近的2×L-1个时间步(L为segment长度),满足实时控制需求,同时使用了混合精度,和ZeRO内存优化
局限
- 与专用控制策略相比,LocoFormer 的训练对资源需求极高。尽管考虑到其覆盖的任务分布更广、上下文更长,这一结果并不意外,但在大规模并行强化学习场景下,仍有通过算法优化降低资源消耗的空间。
- LocoFormer 依赖手工设计的程序化生成任务空间,这种设计方式在通用性上存在挑战。未来研究可探索通过大型语言模型(LLMs)或其他网页级数据源实现任务自动化生成,以获得更具扩展性的方案。
相关工作对比
Legged Locomotion
现有腿部运动控制方法以 “特定形态优化” 为核心,难以泛化到新机器人或极端场景,具体差异如下:
- 训练目标与泛化能力:多针对单一机器人形态(如特定四足、双足)训练,依赖 “仿真 - 现实” 迁移时的精细参数校准;LocoFormer 则通过程序生成机器人 + 激进域随机化 ,覆盖双足、四足及轮式变体,无需针对目标机器人调参,可直接零样本部署。
- 上下文长度与适应能力:现有控制器仅依赖数百毫秒的短上下文,无法应对形态突变(如断腿、锁轮);LocoFormer 将上下文扩展至秒级(最长约 18 秒),能跨 episode 学习,从早期摔倒中优化后续控制策略。
Cross-Embodiment Learning
跨形态学习旨在让单一策略适配多种机器人,但现有方法存在 “结构依赖” 或 “场景局限”,具体差异如下:
- 策略结构设计:部分工作通过图神经网络(GNN)或 Transformer 注意力掩码,将机器人形态作为结构先验嵌入策略;LocoFormer 无需显式形态信息,仅通过统一观测 / 动作空间 + 长上下文记忆,自动学习不同形态的控制模式(如轮式锁死后切换为步行步态)。
- 训练规模与场景覆盖:现有方法仅在少量选定机器人(如特定四足)上训练,场景局限于单一运动类型;LocoFormer 在10 万 + 生成机器人上大规模训练,覆盖腿式、轮式及混合形态,能适配训练中未见过的真实机器人(如 Unitree G1、H1)。
自适应学习(Adaptation)
自适应学习关注 “快速适应新任务 / 环境”,但现有方法多针对低频率任务或需额外微调,具体差异如下:
- 适应场景与频率:元学习或微调方法需针对新动态(如负载变化)额外训练,且多适用于低频率决策任务;LocoFormer 在高频控制场景(50Hz) 下无需微调,仅通过 5 秒内的试错即可适应极端变化(如腿长增加、断腿)。
- 上下文利用方式:部分工作虽能跨 episode 适应,但局限于游戏类开放任务;LocoFormer 通过Transformer-XL 的段级循环机制,将上下文记忆扩展至多层级(如 6 层 + 128 段长实现 896 步记忆),确保高频控制中高效利用历史信息。
Takeaway
核心是解决传统控制器“特定形态依赖、适应能力弱”的痛点,主要通过:
- 程序生成十万+机器人(覆盖双足、四足、轮式及混合形态)+ 激进的域随机化方法
- Transformer-XL上下文记忆架构,使得记忆可跨episode传递,能从早期失败(如摔倒)中提取信息,优化后续控制。
实际部署发现拥有��强大的零样本泛化能力、秒级的适应能力。
论文指出当前方案的不足:
- 训练资源消耗高,LocoFormer的大规模训练需500倍于“单形态专家政策”的计算资源(虽分摊到10万+机器人后“单位机器人成本更低”,但整体门槛仍高),未来需通过算法优化(如并行RL、混合精度训练)降低成本。
- 任务生成依赖人工设计,现有程序生成机器人生成需手动定义形态范围(如关节类型、肢体数量),难以覆盖所有真实机器人的特殊性(如某些机器人的关节轴偏移)。未来可结合LLM等工具实现“自动化任务生成”,进一步扩大训练多样性。
问题
- 没有用Diffusion Policy吗?输出的动作空间怎么定义的?序列动作如何输出?
- 纯Transformer,动作空间就是上面说的统一空间,序列动作论文没有用没有类似action chunk的东西,但是提到用了kv cache加速推理,可能还是单步推理。
- 如何实现新动作?
- 纯靠泛化,只能走路,失败的状态会保存到kv cache,后面再尝试就能成功。
- 能否实现参考视频动作的机器人动作镜像?
- 貌似不太行
- 罗列下复现有哪些困难点?
- 论文很多细节没说、分布式强化学习代码编写、训练资源、走路目前对我们来说没用
一句话总结
跨本体 + 大数据量RL + 统一关节空间 (Unified Observation, Action and Reward Space)+ 长上下文 带来超强泛化能力
具体是 Transformer-XL 还是 Diffusion Policy应该影响不大,无非是推理效率问题