Deep-Dual-resolution-Networks-for-Real-time-and-Accurate-Semantic-Segmentation-of-Road-Scenes
论文名称:Deep-Dual-resolution-Networks-for-Real-time-and-Accurate-Semantic-Segmentation-of-Road-Scenes
作者:Y uanduo Hong, Huihui Pan, Weichao Sun
摘要和介绍
- 语义分割是车辆理解周围场景的关键技术,但是其繁重的计算和漫长的推理的时间是自动驾驶所不能接受的;
- 实时语义分割的相关工作大多使用 encoder-decoder 或 two-pathway 的轻量级架构,或是对低分辨率的图像进行预测,虽然能够实现较快的场景解析,但是这些方法与基于 dilation 的主干的模型在精度表现上仍有很大差距;
- 为了解决上述问题,提出了一系列(a family)专门为实时语义分割设计的高效主干网络,称为 Deep Dual-resolution Network,DDRNets 由两个分支组成,在这个两个分支会进行多次的双边融合(bilateral fusions);
- 设计了一个上下文语义抽取器,被称为(Deep Aggregation pyramidpooling Module),用于扩大感受野,同时基于低分辨率特征图融合多尺度的上下文信息,而推理时间几乎没有增加;
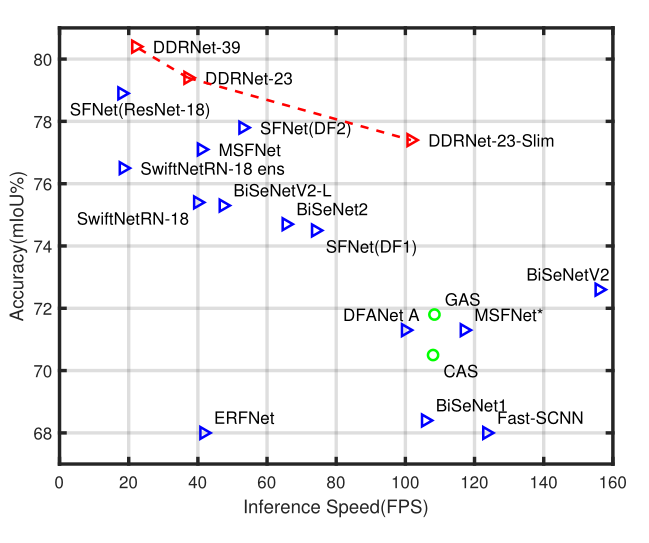
- SOTA!
相关工作
High-performance Semantic Segmentation
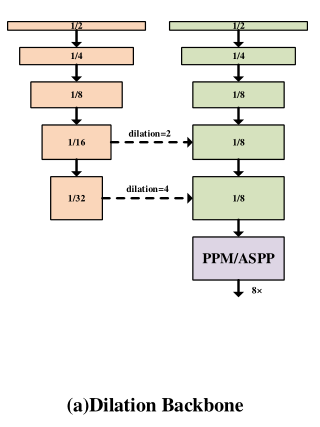
目前,大多数最先进的(卷积)语义分割模型都是基于 dilation 的主干网络,同时需要网络保持高分辨率以获得良好的性能,然而高分辨率的计算量需求和 dilation convolution 的不充分优化注定了实时语义分割实现高性能的困难性。
Real-time Semantic Segmentation
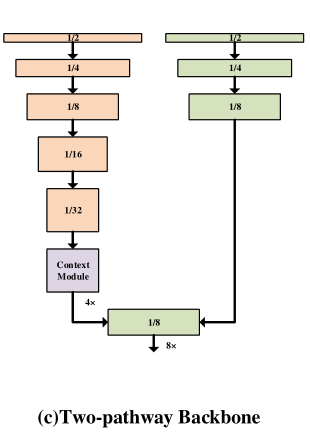
几乎所有的实时语义分割模型都采用了两种基本方法:encoder-decoder 和 two-pathway,同时轻量级的编码器在这两种方法中扮演着重要作用。
-
编码器 - 解码器结构
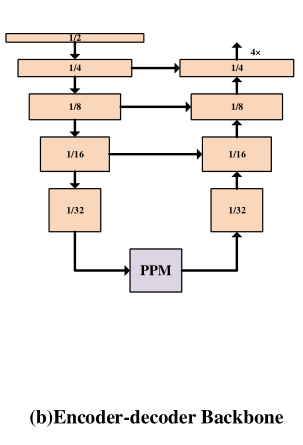
这种结构很直观的减少了计算量和推理时间,并且其编码器是可以在 ImageNet 上预先训练的轻量级主干网络,也可以是从头训练的高效变体,相关工作有 SwiftNet、FANet、SFNet 等。
-
双路结构
编码器 - 解码器结构虽然降低了计算量,但是在重复下采样中丢失了一些信息,为了缓解这个问题,提出了双路结构,除了一个提取语义信息的路径之外,另一条高分辨率的路径作为补充提供丰富的空间细节,相关工作有 BiSeNetv1 v2、Fast SCNN、CABiNet 等。
-
轻量级编码器
许多轻量的主干都可以用作编码器——MobileNet、ShuffleNet、Xception 等,然而这些网络包含许多如可分离卷积等不能高效实现的组件,这就导致了其理论计算量(FLOPs)可能很低,但是速度并不是很快,另外现有的轻量级骨干网络可能不适合语义分割,因为他们通常对图像分类进行了过度调整。
Context Extraction Modules
语义分割的一个关键是如何捕捉丰富的上下文信息,目前已有的上下文提取模块如 ASPP、PPM 等都是为高分辨率而设计,过于耗时。
Method
接下来介绍两个主要组件——Deep Dual-resolution Network 和 the Deep Aggregation Pyramid Pooling Module
Deep Dual-resolution Network
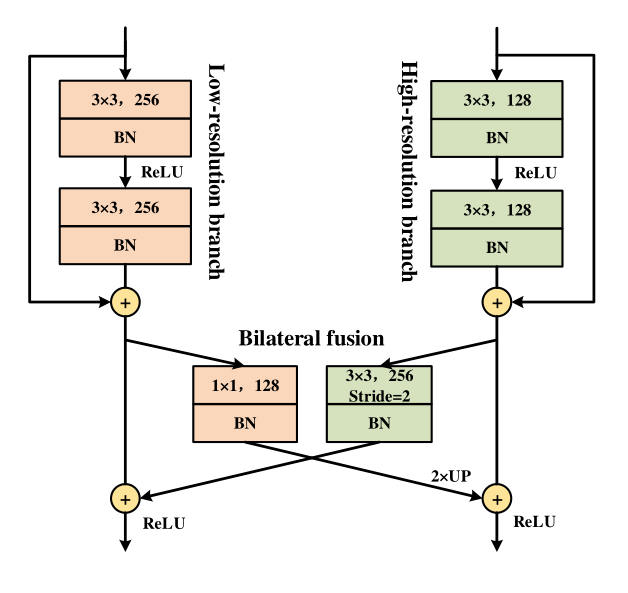
对一些通用的分类主干网络(如 ResNet)添加额外的高分辨率分支,为了实现分辨率和推理速度之间的均衡,在特征图大小为 时添加高分辨率分支,高分辨率分支不包含任何下采样操作,并且与低分辨率分支具有一一对应的关系,然后会在不同的阶段进行多次双边融合,如上图所示。
具体看论文。
Deep Aggregation Pyramid Pooling Module
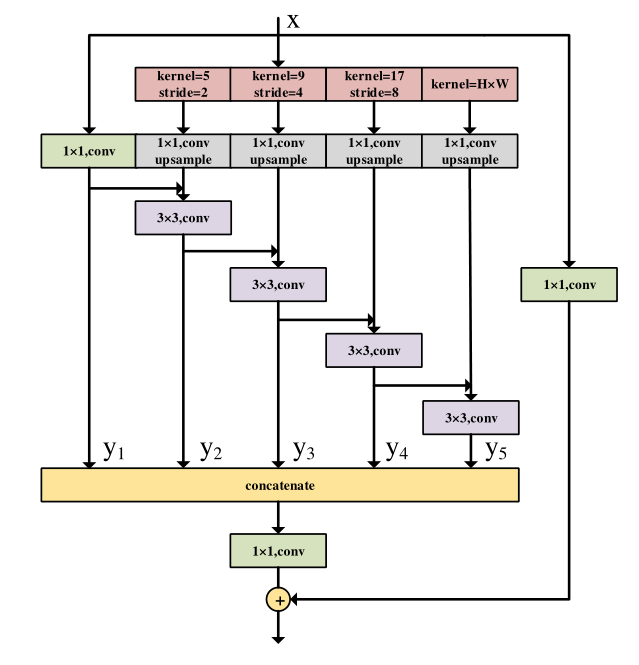
DAPPM 的结构如图所示,其会进行不同尺度()的下采样,虽然看起来计算量比较大,但是该模块应用在低分辨率分支,对于 1024×1024 的输入图像,改模块的输入仅为 16×16.
overall architecture
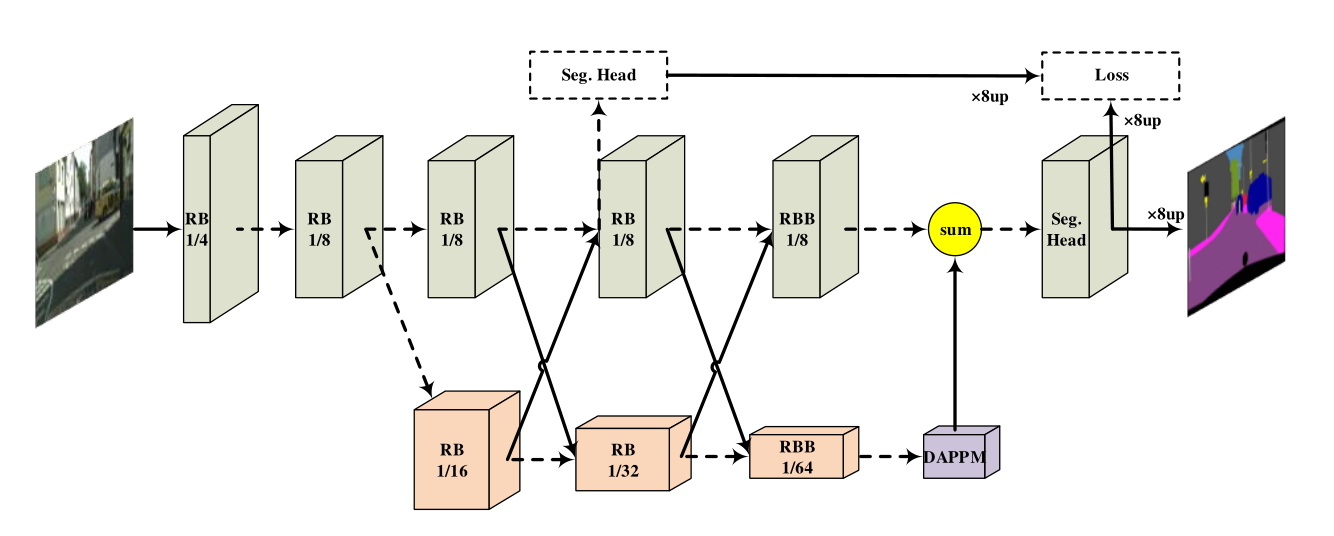
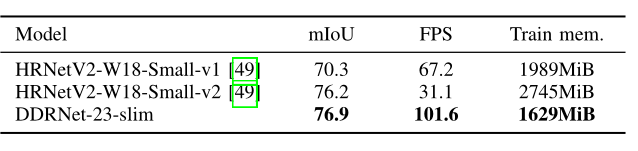
网络的整体结构大致如图所示,其实和 HRNet 比较像,区别就是分支数量不同,并且额外添加了多尺度的特征提取模块,与 HRNet 的对比如下所示: